Here are some of my main works! Of course, I have done much more than these!
I have also participated in some commercial projects, but I can only show part of them due to IP reasons…
If you want to know more about my work, please visit my blog or contact me via email!
MPhil Work (2024 – Present)
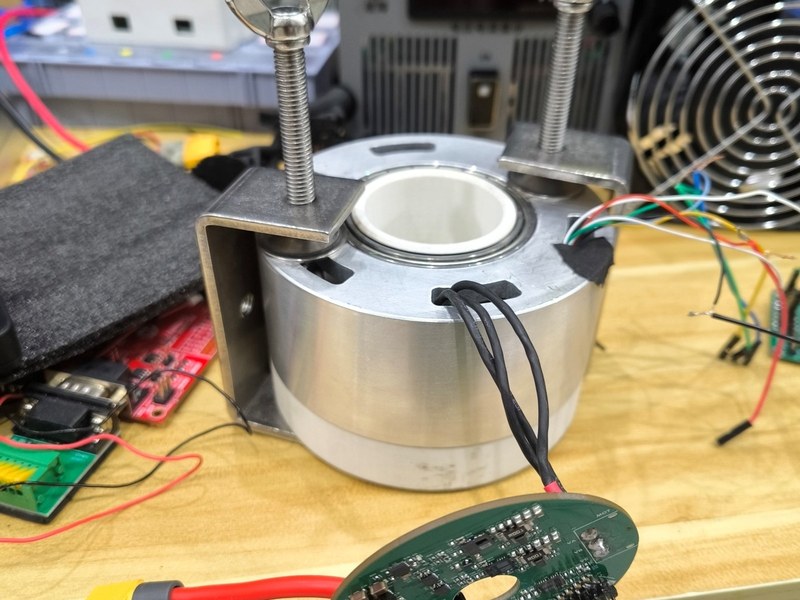
In-house Motor Drivers and a Custom Dynamometer for Quadruped / Humanoid Robotics
MPhil-level hardware work: three iterations of motor driver (V1 stacked → V3 single-board 72 mm), a FreeRTOS firmware running an 80 kHz FOC loop, an EtherCAT/CAN communication bridge with multi-protocol adaptation (MIT / LK / DJI), a custom 48 V soft-pack battery, and a 0–200 Nm bench-built dynamometer.

ArcDog: Optimal Trajectory Planning and Control for Quadruped Jumping through Constrained Obstacles
MPhil work at HKU ArcLab, submitted to IEEE TIE. A hierarchical TO + kinodynamic NMPC + WBC framework that lets the self-developed ArcDog quadruped jump through framed obstacles, plus a novel multiple-shooting (MS) constrained DDP solver inside the NMPC.

M20 Wheel-Legged Quadruped: MoE Policy, Sim2Sim and Sim2Real
MPhil-stage RL work on the DeepRobotics M20 wheel-legged platform: an IsaacLab-developed MoE policy validated via Sim2Sim in MuJoCo; the cross-host transport for real-robot deployment has been rebuilt as a three-end TCP pipeline. Write-up still being polished.
Undergraduate Work (2020 – 2024)

Biomimetic Flying Fish with Solid-State Energy Source
A vehicle capable of cross-medium navigation, using electric stones as the energy source and lightweight waterproof hardware design.

Wave-like Propulsion Vehicle
A MPF wave propulsion vehicle based on a new motion model. It uses servos or piezoelectric actuators as drive modules.

Robocup Middle-Size League Wheeled Robot
An autonomous robot based on a wheeled model. It uses omni-wheels or steering wheels as the motion unit and performs excellently on the field.
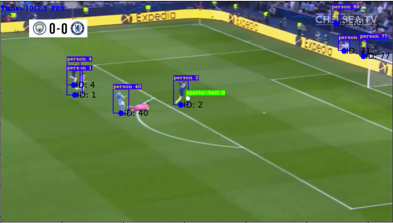
Player Recognition and Position Localization Based on YOLOv5 and Resnet18
Implemented player recognition and position localization based on YOLOv5 and Resnet18 as the final project for my deep learning course, reproducing existing research papers.
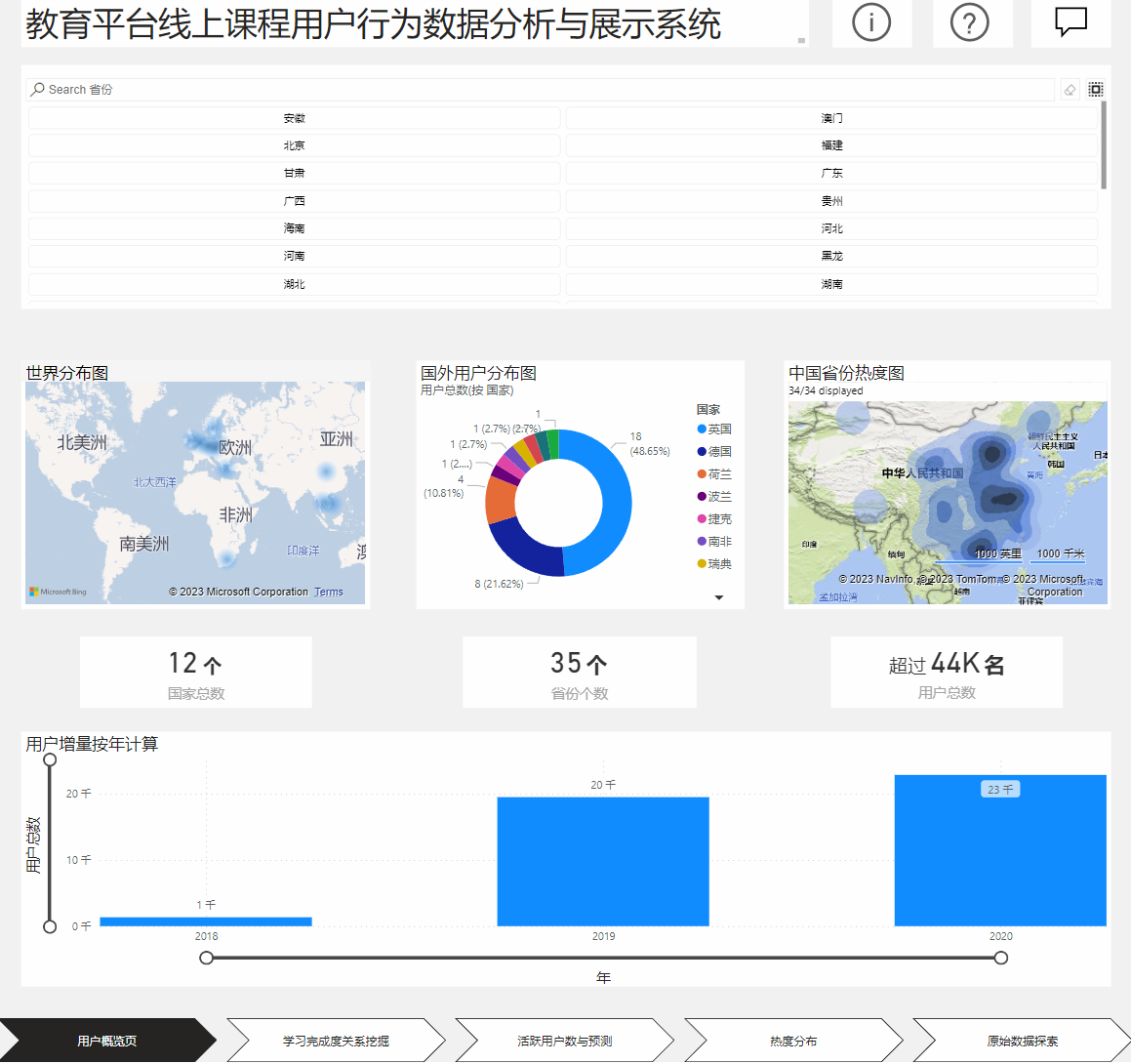
Education Platform Online User Behavior Analysis and Display System
Utilized Microsoft’s Power BI tools in conjunction with R and Python programming languages to develop data analysis and predictive models for analyzing and showcasing the online user behavior on the education platform.
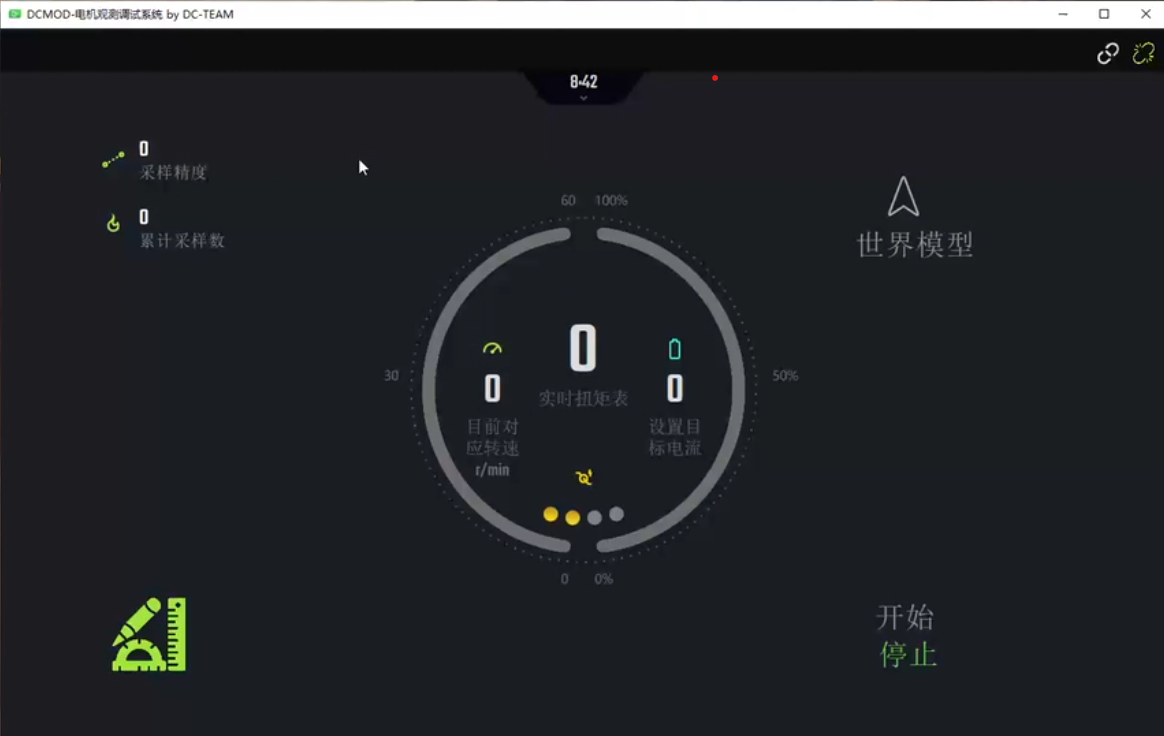
DCMOD DC Motor Observation and Debugging System
Designed a beautiful interface based on QML (QT Designer) and communicated with the lower computer using the ATOM_LINKER protocol, allowing users to intuitively debug and control DC motors.