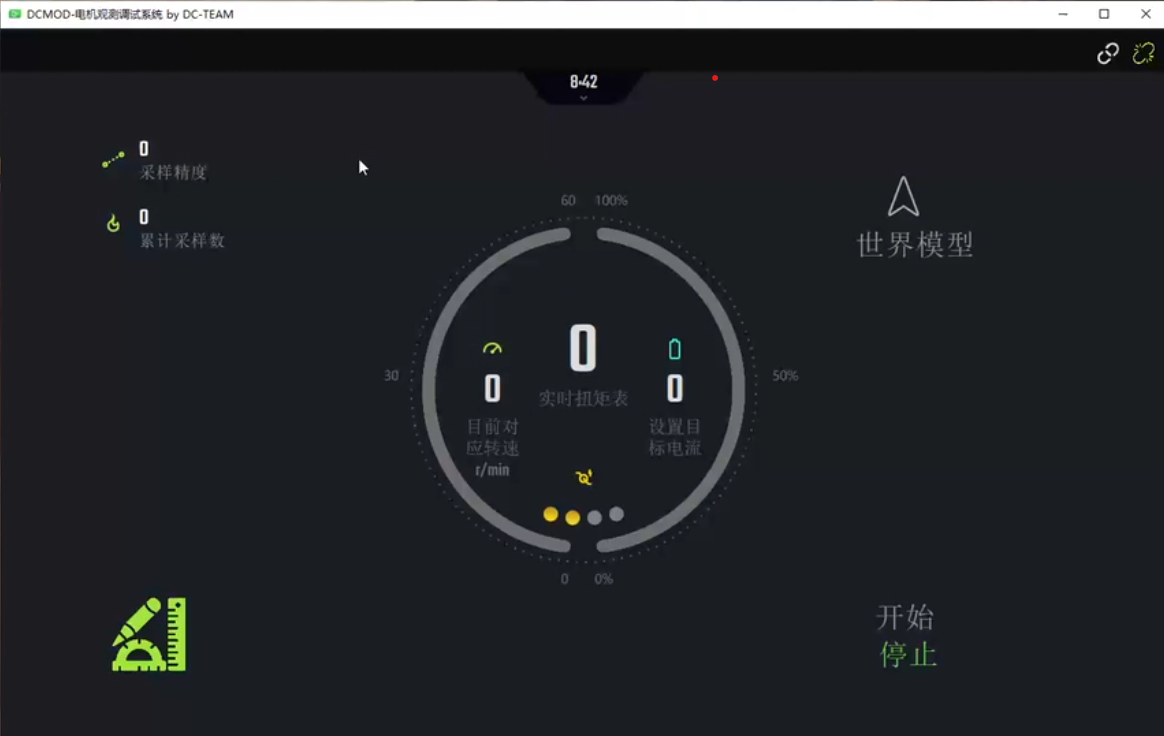
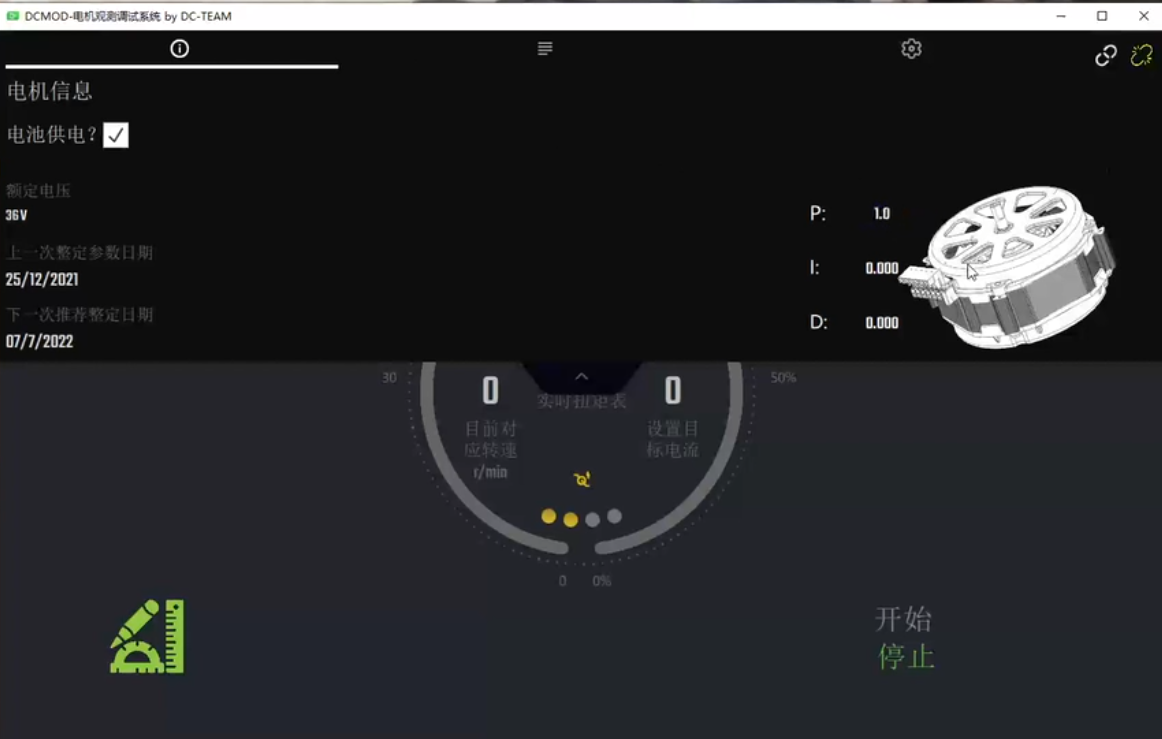
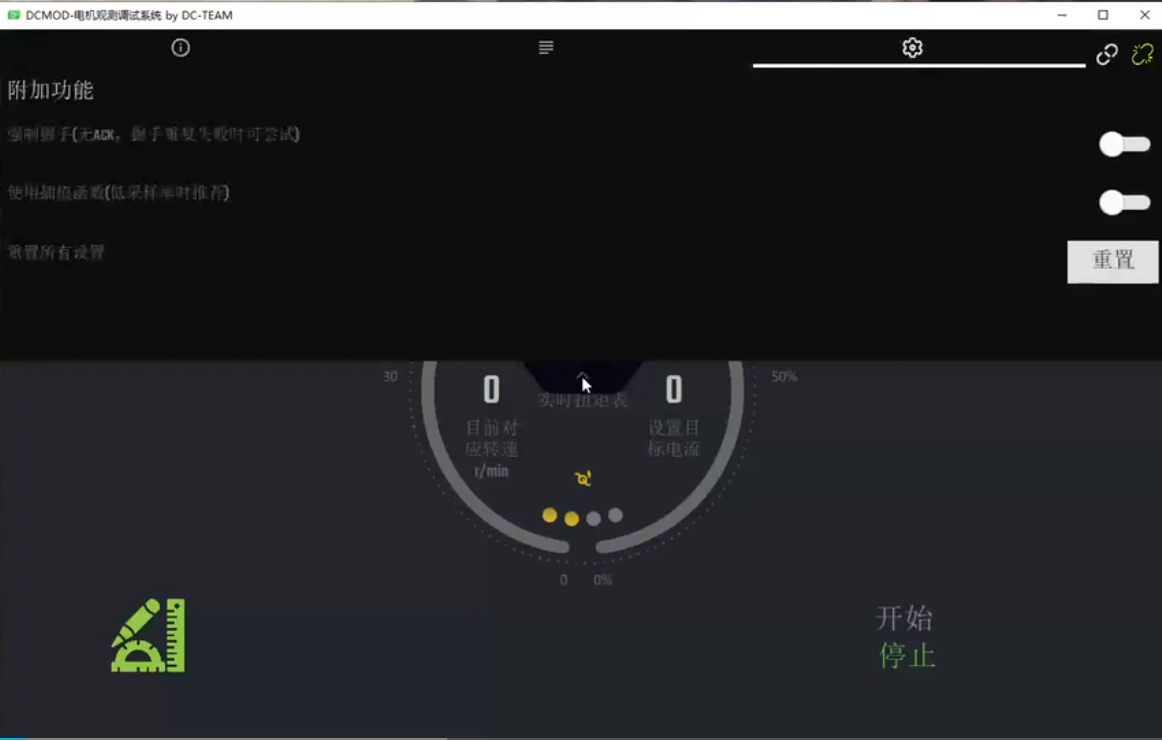
UI Preview

Video
For more details, visit the repository
Click to access the repository {: .btn .btn–primary .btn–x-large}